一、研究人员的合作与分工
本项目研究过程中,对项目研究的主要贡献以项目负责人和实验室研究生团队为主。具体人员情况如下表所示。
|
研究目标
|
实际进展
|
完成情况
|
|
陈思鲁
|
中国科学院宁波材料技术与工程研究所
|
项目负责人、关节与机器人控制算法研究
|
|
陈庆盈
|
中国科学院宁波材料技术与工程研究所
|
一体化关节设计方法研究
|
|
潘新安
|
中国科学院沈阳自动化研究所
|
连杆刚度分配、轻量化设计方法研究与柔顺控制测试
|
|
Soh Gim Song
|
新加坡科技设计大学
|
机构刚度分析与拓扑结构优化算法研究
|
|
凌烈
|
中国科学院沈阳自动化研究所
|
协作机器人本体设计
|
|
宋孙浩
|
中国科学院宁波材料技术与工程研究所
|
控制板设计与机械臂柔顺控制算法实现
|
|
孙贤备
|
中国科学院宁波材料技术与工程研究所
|
关节力矩电机设计方法研究
|
|
李荣
|
中国科学院宁波材料技术与工程研究所
|
电机驱动板设计与电机矢量控制算法实现
|
|
周杰
|
中国科学院宁波材料技术与工程研究所
|
机器人电机驱动调试与关节动态响应测试
|
|
乔海
|
中国科学院宁波材料技术与工程研究所
|
电路板制作与机器人电气系统集成
|
|
万红宇
|
中国科学院宁波材料技术与工程研究所
|
关节匹配设计、样机试制和柔顺控制
|
|
孔祥杰
|
中国科学院宁波材料技术与工程研究所
|
机械臂样机研制、动力学建模和柔顺控制
|
|
王天龙
|
中国科学院沈阳自动化研究所
|
实验系统搭建及实验研究
|
|
王大千
|
中国科学院沈阳自动化研究所
|
实验系统搭建及实验研究
|
二、人才培养情况
项目执行期间,项目负责人陈思鲁晋升三级研究员(图
85),项目成员陈庆盈晋升四级研究员(图
86)。项目培养研究生13名,其中博士研究生3名,硕士研究生10名。具体情况见表
6。其中,项目成员万红宇获得国家奖学金(图
87)、中国科学院“中银-科苑优秀学子”奖等荣誉(图 88)。
|
序号
|
学生
|
培养单位
|
学位
|
|
1
|
袁黎明
|
中国科学院宁波材料技术与工程研究所
|
博士
|
|
2
|
罗竞波
|
中国科学院宁波材料技术与工程研究所
|
博士
|
|
3
|
辛强
|
中国科学院宁波材料技术与工程研究所
|
博士
|
|
4
|
张拓璞
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
5
|
应凯宸
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
6
|
杨鑫
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
7
|
朱禹帆
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
8
|
汪龙祥
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
9
|
刘艺莎
|
中国科学院宁波材料技术与工程研究所
|
硕士
|
|
10
|
祝世静
|
中国科学院沈阳自动化研究所
|
硕士
|
|
11
|
杜天野
|
中国科学院沈阳自动化研究所
|
硕士
|
|
12
|
董尚群
|
中国科学院沈阳自动化研究所
|
硕士
|
|
13
|
胡伟涛
|
中国科学院沈阳自动化研究所
|
硕士
|

在以上科研成果基础上,项目牵头单位荣获2024特种机器人产业链“揭榜”推进活动优胜单位(图
89),项目研发“柔性协作机械臂”获特种机器人产业链“揭榜”推进活动优秀方案(图
90)。此外,项目组成员积极参与机器人领域国际学术会议和国际竞赛,并获得多项奖励(图
91-图 93)。



三、项目成果
项目研究成果主要为围绕研究目标开展科研工作形成的学术论文,以及在此基础上拓展应用申请或授权的专利。
在论文发表方面,已发表69篇学术论文,其中学术期刊论文38篇(IEEE Trans
16篇),学术会议论文31篇,包括TCYB、TII、TMECH、MMT、RCIM、Automatica、IROS等知名国际学术期刊和国际学术会议。
在专利方面,已申请国家发明专利10项。其中,5项专利已授权。
3-1 期刊论文
[1] Yuan L, Chen S, Zhang C, et al. Parameter space optimization for
robust controller synthesis with structured feedback gain[J]. IEEE
Transactions on Cybernetics, 2022, 53(11): 6815-6828.
[2] Yuan L, Chen S, Zhang C, et al. Structured controller synthesis
through block-diagonal factorization and parameter space
optimization[J]. Automatica, 2023, 147: 110709.
[3] Luo J, Chen S, Zhang C, et al. Efficient kinematic calibration
for articulated robot based on unit dual quaternion[J]. IEEE
Transactions on Industrial Informatics, 2023, 19(12): 11898-11909.
[4] Luo J, Chen S, Jiang D, et al. Efficient Kinematic Calibration
for Parallel Manipulators Based on Unit Dual Quaternion[J]. IEEE
Transactions on Industrial Informatics, 2024.
[5] Xu C, Chen S, Kong X, et al. Robust Feature Selection by Removing
Noise Entropy within Mutual Information for Limited-sample Industrial
Data. IEEE Transactions on Industrial Informatics. (Accept)
[6] Wan H, Chen S, Zhang C, et al. Compliant control of flexible
joint by dual-disturbance observer and predictive feedforward[J].
IEEE/ASME Transactions on Mechatronics, 2023, 28(4): 1890-1899.
[7] Yang J, Chen J, Liu W, et al. Multiobjective Optimization of the
PMSM With the Same Number of Poles and Slots Considering Dynamic
Response and Torque Performance[J]. IEEE/ASME Transactions on
Mechatronics, 2024.
[8] Yang J, Chen J, Liu W, et al. Research on Torque Characteristics
of the PMSM with the Same Number of Poles and Slots[J]. IEEE
Transactions on Transportation Electrification, 2024.
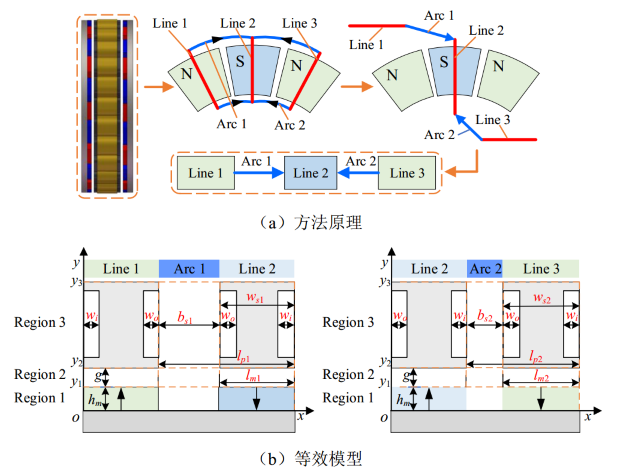
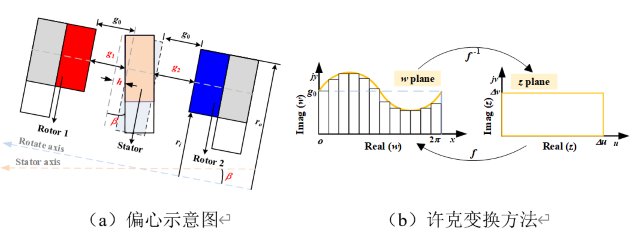
[9] Zhang C, Yi F, Qiu S, et al. A Hybrid Analytical Method for
Yokeless and Segmented Armature Machine Considering Rotor Shifting and
Eccentricity[J]. IEEE Transactions on Transportation Electrification,
2024.
[10] Chen J, Yang J, Yang G, et al. Design of a Novel PMSM Topology
with the Same Number of Poles and Slots[J]. IEEE Transactions on Energy
Conversion, 2024.
[11] Yi F, Zhang C, Qiu S, et al. An Accurate and Efficient Two-Level
Optimization for YASA Machine from the Perspective of Analytical and
Surrogate Models[J]. IEEE Transactions on Energy Conversion, 2024.
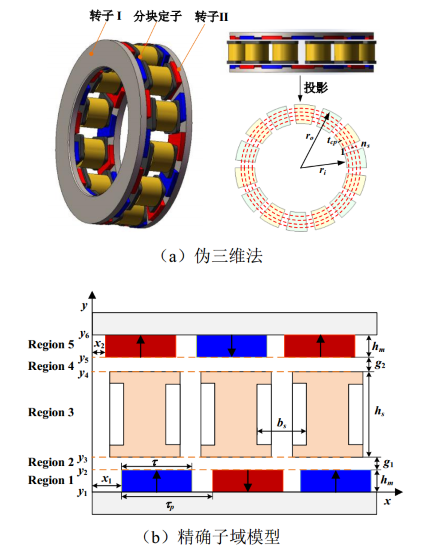
[12] Yi F, Zhang C, Qiu S, et al. Quasi-3-D analytical method of
open-circuit magnetic field for yokeless and segmented armature
machine[J]. IEEE Transactions on Magnetics, 2023, 59(12): 1-10.
[13] Zhang Z, Chen S, Luo J, et al. Motorized Measurement of
Deformation on Surface of Revolution With 2-D Laser Profiler[J]. IEEE
Transactions on Instrumentation and Measurement, 2023, 72: 1-10.
[14] Zhou Y, Chen C Y, Tang Y, et al. A Comprehensive On-Load
Calibration Method for Industrial Robots Based on a Unified Kinetostatic
Error Model and Gaussian Process Regression[J]. IEEE Transactions on
Instrumentation and Measurement, 2024.
[15] Yang J, Chen J, Yang G, et al. Research on Winding MMF Harmonics
of the PMSM with the Same Number of Poles and Slots[J]. IEEE
Transactions on Industry Applications, 2023.
[16] Yang J, Chen J, Cai Z, et al. Design and Optimization of a Novel
Permanent Magnet Linear Motor with the Same Number of Poles and
Slots[J]. IEEE Transactions on Industry Applications, 2024.
[17] Yuan B, Wang H, Yuan H, et al. Mobility and applied
load-oriented mechanism configuration design method[J]. Mechanism and
Machine Theory, 2023, 182: 105234.
[18] He J, Gu L, Yang G, et al. A local POE-based self-calibration
method using position and distance constraints for collaborative
robots[J]. Robotics and Computer-Integrated Manufacturing, 2024, 86:
102685.
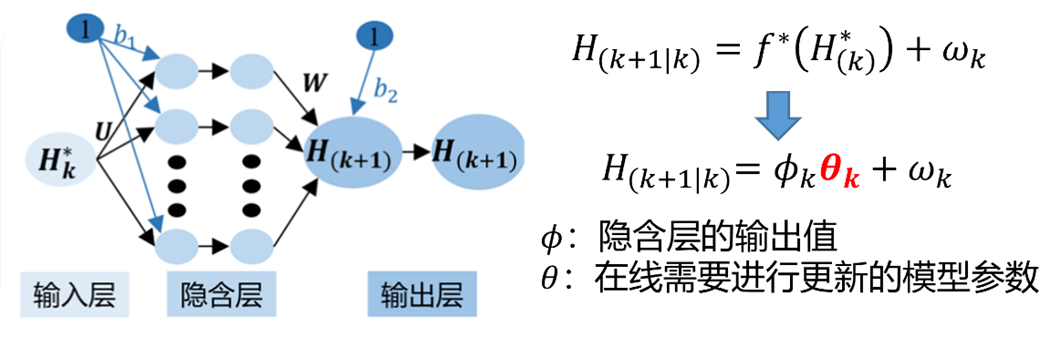
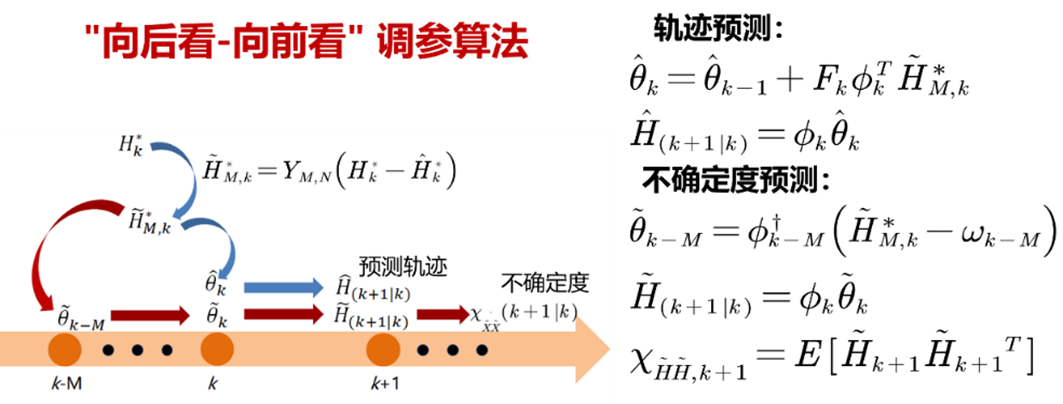
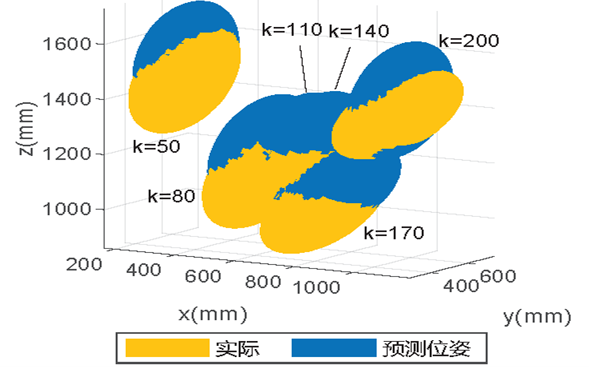
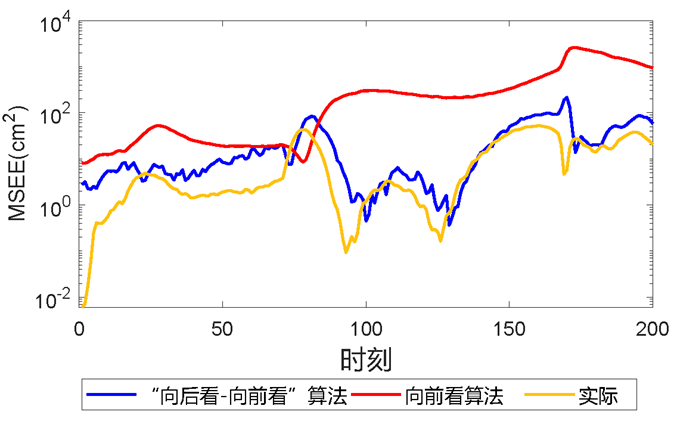
[19] Chen S, Zhu Y, Liu Y, et al. A “look-backward-and-forward”
adaptation strategy for assessing parameter estimation error of human
motion prediction model[J]. IEEE Robotics and Automation Letters, 2022,
7(2): 2629-2636.
[20] Xin Q, Wang C, Chen C Y, et al. Robust vibration control based
on rigid-body state observer for modular joints[J]. Machines, 2021,
9(9): 194.
[21] Dai J, Chen C Y, Zhu R, et al. Suppress vibration on robotic
polishing with impedance matching[J]. Actuators, 2021, 10(3): 59.
[22] Zhang T, Du Q, Yang G, et al. Assembly configuration
representation and kinematic modeling for modular reconfigurable robots
based on graph theory[J]. Symmetry, 2022, 14(3): 433.
[23] Qiu B, Chen S, Gu Y, et al. Concurrent layout and trajectory
optimization for robot workcell toward energy-efficient and
collision-free automation[J]. The International Journal of Advanced
Manufacturing Technology, 2022, 122(1): 263-275.
[24] Zhou Y, Chen C Y, Zhang L, et al. Research on Force-Frequency
Coefficient of Square Quartz Crystal With Encapsulation Body[J]. IEEE
Sensors Journal, 2023, 23(12): 13469-13477.
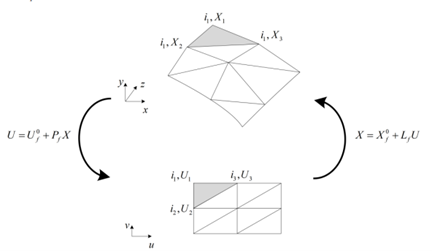
[25] Hu W, Pan X, Wang H. Proxy-based guidance virtual fixtures with
orientation constraints[J]. International Journal of Intelligent
Robotics and Applications, 2024: 1-11.
[26] Ai W, Pan X, Jiang Y, et al. Neural admittance control based on
motion intention estimation and force feedforward compensation for
human–robot collaboration[J]. International Journal of Intelligent
Robotics and Applications, 2024, 8(3): 560-573.
[27] Dong S, Pan X, Wang H. An Improved Equivalent Impact Model of
Human Thorax for Human-Robot Collaboration[J]. International Journal of
Intelligent Robotics and Applications, 2022, 6(3): 426-436.
[28] Dong S, Pan X, Wang H, et al. A new link-legged insulator
inspection robot[J]. Electric Power Systems Research, 2022, 213:
108741.
[29] Saifan A, Chen S, Saleh B, et al. Enhancing microstructure and
mechanical performance of 6061-T4 aluminum alloy through robotic
ultrasonic multi-needle peening[J]. Journal of Alloys and Compounds,
2025, 1010: 177760.
[30] Saifan A, Chen S, Miao H, et al. Data-driven modeling and
optimization of a robotized multi-needle ultrasonic peen-forming process
for 2024-T3 aluminum alloy[J]. The International Journal of Advanced
Manufacturing Technology, 2024: 1-23.
[31] Yuan T, Zhang C, Yi F, et al. RBFNN-Based Adaptive Integral
Sliding Mode Feedback and Feedforward Control for a Lower Limb
Exoskeleton Robot[J]. Electronics, 2024, 13(6): 1043.
[32] 袁兵兵,王洪光,潘新安等.
一种轻质大负载混联操作臂机构设计[J].高电压技术, 2022,48(S):220-227.
[33]
刘童剑,陈思鲁,袁黎明,张驰,杨桂林.柔性连接双驱龙门在三元控制架构下的前馈控制器参数整定[J].机械制造,2023,61(6):36-41.
[34]
乔海,高云鹏,陈进华,等.永磁同步电机高精度线性霍尔检测技术研究[J].电工电气,2023,(09):47-51.
[35]
艾文旭,姜勇,潘新安,等.考虑全状态约束和扰动的机械臂神经网络控制[J/OL].信息与控制,1-12[2025-01-09].https://doi.org/10.13976/j.cnki.xk.2024.4095.
[36] 沈琰波,陈思鲁,Adnan
Saifan,等.面向2024-T3铝片的机器人超声喷丸校形研究[J].机械制造,2024,62(05):49-54+68.
[37]
舒鑫东,易锋,张辉等.考虑定子轴向偏移的YASA轴向磁通电机解析方法[J].电机与控制学报,2024.
[38]
舒鑫东,孔祥杰,陈思鲁等.柔性关节协作机器人自适应跃度的鲁棒跟踪控制[J].组合机床与自动化加工技术,2024.
3-2 会议论文
[1] He J, Feng Y, Yang G, et al. A Piecewise-weighted RANSAC Method
Utilizing Abandoned Hypothesis Model Information with a New Application
on Robot Self-calibration[C]//2024 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS). IEEE, 2024: 898-905.
[2] Qiu B, Chen S, Xiao T, et al. A feasible method for evaluating
energy consumption of industrial robots[C]//2021 IEEE 16th Conference on
Industrial Electronics and Applications (ICIEA). IEEE, 2021:
1073-1078.
[3] Xin Q, Wang C C, Chen C Y, et al. A Vibration Suppression
Controller Design for a Two-Link Manipulator with Flexible
Joints[C]//2021 3rd International Symposium on Robotics &
Intelligent Manufacturing Technology (ISRIMT). IEEE, 2021: 454-458.
[4] Dai J, Chen C Y, Zhu R, et al. An active vibration suppression
method for macro-mini manipulator[C]//2021 IEEE 11th Annual
International Conference on CYBER Technology in Automation, Control, and
Intelligent Systems (CYBER). IEEE, 2021: 158-162.
[5] Yang X, Chen C, Wang C, et al. The Dynamic Effect of Gearbox
Parameters for Physical Human-robot Interaction Performance[C]//2021 3rd
International Symposium on Robotics & Intelligent Manufacturing
Technology (ISRIMT). IEEE, 2021: 56-60.
[6] Duan R, Wang C, Chen C Y, et al. Variable Admittance Control by
Measuring Arm Impedance[C]//Intelligent Robotics and Applications: 14th
International Conference, ICIRA 2021, Yantai, China, October 22–25,
2021, Proceedings, Part II 14. Springer International Publishing, 2021:
480-490.
[7] Zhu Y, Chen S, Zhang C, et al. Revised Discrete Control Barrier
Functions for Safe Control of a Redundant DoF
Manipulator[C]//International Conference on Intelligent Robotics and
Applications. Cham: Springer International Publishing, 2022:
530-539.
[8] Ying K, Wang C, Chen C Y, et al. A Human Intention Based Fuzzy
Variable Admittance Control System for Physical Human–Robot
Interaction[C]//2022 IEEE/ASME International Conference on Advanced
Intelligent Mechatronics (AIM). IEEE, 2022: 202-207.
[9] Chen C Y, Xin Q, Li F. Observer based Vibration Damping
controller design for a two link Lightweight Manipulator[C]//2022 IEEE
17th Conference on Industrial Electronics and Applications (ICIEA).
IEEE, 2022: 325-330.
[10] Li S, Zhang C, Yi F, et al. Hybrid polynomial-based trajectory
planning for lower limb exoskeleton robots[C]//2023 IEEE 18th Conference
on Industrial Electronics and Applications (ICIEA). IEEE, 2023:
1339-1344.
[11] Du Q, Zhang T, Yang G, et al. Analytical Backlash Model for
3K-type Planetary Gear Train with Flexure-Based Anti-backlash
Carrier[C]//International Conference on Intelligent Robotics and
Applications. Singapore: Springer Nature Singapore, 2023: 384-397.
[12] Zhang T, Du Q, Yang G, et al. An Iterative Dynamic Parameter
Identification Method Based on Minimum Parameter Set for Collaborative
Robots[C]//2023 IEEE 18th Conference on Industrial Electronics and
Applications (ICIEA). IEEE, 2023: 1077-1082.
[13] Yuan T, Zhang C, Yi F, et al. Adaptive position tracking control
of the lower limb exoskeleton robot with an uncertain dynamic
model[C]//2023 IEEE 18th Conference on Industrial Electronics and
Applications (ICIEA). IEEE, 2023: 1407-1412.
[14] Lv P, Zhang C, Yi F, et al. A Novel F-SVM based on PSO for Gait
Phase Recognition in Lower Limb Exoskeleton[C]//2023 IEEE 18th
Conference on Industrial Electronics and Applications (ICIEA). IEEE,
2023: 1378-1383.
[15] Zhang M, Zhang C, Yi F, et al. Dual-loop joint torque control
based on lower limb exoskeleton robots[C]//2023 IEEE 18th Conference on
Industrial Electronics and Applications (ICIEA). IEEE, 2023:
1401-1406.
[16] Dai J, Yang X, Chen C Y, et al. A New Torque Estimation Method
Based on Equivalent Efficiency Model and BP Neural Network of
Mechatronic Integrated Joint[C]//2023 IEEE/ASME International Conference
on Advanced Intelligent Mechatronics (AIM). IEEE, 2023: 973-978.
[17] Wei M, Zhang C, Qiao X. An Enhanced Deadbeat Model Predictive
Flux Control for PMSMs with A Reduced Order Disturbance
Observer[C]//2023 IEEE International Conference on Predictive Control of
Electrical Drives and Power Electronics (PRECEDE). IEEE, 2023: 1-6.
[18] Wan H, Chen S, Zhang C, et al. Admittance Control of Flexible
Joint with Dual-Disturbance Observer[C]//International Conference on
Intelligent Robotics and Applications. Singapore: Springer Nature
Singapore, 2023: 197-207.
[19] Chen C Y, Dai J, Wang L, et al. Compliant Control Based on
Stability Observer for Physical Human-Robot-Environment
Interaction[C]//IECON 2023-49th Annual Conference of the IEEE Industrial
Electronics Society. IEEE, 2023: 1-5.
[20] Yang J, Chen J, Qiao J, et al. Design of the Double-Sided Flat
Permanent Magnet Linear Synchronous Motor with the Same Number of Poles
and Slots[C]//2023 26th International Conference on Electrical Machines
and Systems (ICEMS). IEEE, 2023: 1297-1301.
[21] Zhao S, Chen J, Gao Y, et al. Low-Frequency Electromagnetic
Vibration of A Dual Three-Phase PMSM Considering Current Harmonics and
Winding Operating Modes[C]//2023 26th International Conference on
Electrical Machines and Systems (ICEMS). IEEE, 2023: 1190-1195.
[22] Yuan B, Wang H, Pan X. The Mobility and High Load-to-weight
Ratio Oriented Design Criteria of Hybrid Robots[C]//2023 7th
International Conference on Robotics, Control and Automation (ICRCA).
IEEE, 2023: 50-54.
[23] Wang H, Yuan B, Pan X, et al. IDRRS-I-Development of a Robot
System for Insulators Detection and Replacement Task[C]//2023
International Conference on Advanced Robotics and Mechatronics (ICARM).
IEEE, 2023: 1187-1193.
[24] Zhu S, Pan X, Wang H, et al. Modeling of dynamic-elastic
deformation error for a collaborative robot[C]//2023 IEEE 18th
Conference on Industrial Electronics and Applications (ICIEA). IEEE,
2023: 1345-1350.
[25] Du Q, Yang G, Wang W, et al. Dynamic Characteristics of
Self-Eliminating-Backlash 3K Planetary Gear Train with Flexure-based
Carrier[C]//2024 IEEE International Conference on Mechatronics and
Automation (ICMA). IEEE, 2024: 906-911.
[26] Yang J, Wang S, Chen J, et al. Analysis of MMF of the PMSM with
the Same Number of Poles and Slots Considering Different Number of
Winding Turns[C]//2024 IEEE 7th International Electrical and Energy
Conference (CIEEC). IEEE, 2024: 486-490.
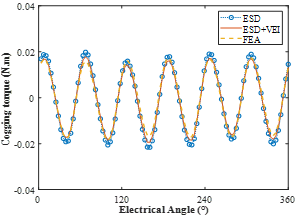
[27] Yi F, Zhang C, Qiu S, et al. Shifting Technique for Cogging
Torque Suppression in Yokeless and Segmented Armature Machines[C]//2024
3rd International Conference on Power Systems and Electrical Technology
(PSET). IEEE, 2024: 435-440.
[28] Zhang T, Du Q, Yang G, et al. Sensorless Impedance Control of
Robot Joints with 3K Gear Drives Considering Transmission
Efficiencies[C]//2024 IEEE 19th Conference on Industrial Electronics and
Applications (ICIEA). IEEE, 2024: 1-6.
[29] Zhang H, Zhang C, Yi F, et al. Matching Design and
Multi-objective Optimization of Integarated joint for collaborative
robot[C]//2024 IEEE 19th Conference on Industrial Electronics and
Applications (ICIEA). IEEE, 2024: 1-6.
[30] Zhang H, Qiu S, Wang J, et al. The study of phase change thermal
management schemes for motors under frequent overloads[C]//2024 IEEE
International Conference on Electrical Energy Conversion Systems and
Control (ICEECSC). IEEE, 2024.
[31] Guo H, Zhao Y, Chen C, et al. Vibration Analysis of Flexible
Joints under Variable Rotational Conditions Using Synchronous Sampling
[C]//2024 4th International Conference on Mechanical Automation and
Electronic Information Engineering(MAEIE 2024). IEEE, 2024.
3-3 专利
[1]
陈思鲁,刘艺莎,朱禹帆,张驰,杨桂林.肢体运动轨迹及其预测误差的预测方法、系统和电子装置.
CN114418159A.(已授权)
[2] 陈进华,杨九铜,杨桂林,张驰,陈庆盈,李荣.一种同极同槽三相永磁电机.
CN114050671A.(已授权)
[3]
陈进华,杨九铜,杨桂林,张驰,陈庆盈,李荣.一种模块化定子结构、设计方法及同极同槽永磁电机.
CN114050670A.(已授权)
[4]
王冲冲,杨桂林,陈庆盈,张拓璞,周杰,张驰.协作机器人关节力矩控制方法、系统及计算机设备.
CN114310874A.(已授权)
[5]
陈庆盈,辛强,王冲冲,张驰,杨桂林.一种双编码器柔性关节的振动抑制控制系统.
CN212543695U.(已授权)
[6]
舒鑫东,张驰,王慰军,李荣,陈庆盈,杨桂林.力矩电机驱动控制方法及机器人关节.CN:CN115570591A.
[7]
杨桂林,何建辉,陈思鲁,万红宇,罗竞波,汤烨,张志辉,陈庆盈,张驰.一种基于位姿约束和力感知的机器人标定方法.
CN115319727A.
[8]
杨桂林,何建辉,陈思鲁,罗竞波,万红宇,张志辉,汤烨,陈庆盈,张驰.一种基于位置和距离约束的机器人标定方法.
CN115319726A.
[9]
陈进华,杨九铜,杨桂林,张驰,陈庆盈,张杰,乔继军.平板型同极同槽永磁直线电机.
CN115347755A.
[10]
陈思鲁,孔祥杰,万红宇,杨威龙,胡翰泽,杨桂林,张驰.基于自适应跃度的柔性关节协作机器人控制方法及应用.
202411859860.0.