5.1 “电机-关节-协作臂”样机研制
基于一体化关节、轻量化设计连杆组件以及通讯架构研制了20kg和25kg七自由度协作机器人两套,详细性能参数如下:
1) 20kg协作机器人:末端负载为8kg,机器人工作半径≥100cm。在负载3.5kg与运行速度0.27m/s情况下,机器人重复定位精度为0.03mm。
2) 25kg协作机器人:末端负载为10kg,机器人工作半径≥120cm。在负载5.5kg与运行速度0.27m/s情况下,机器人重复定位精度为0.05mm。
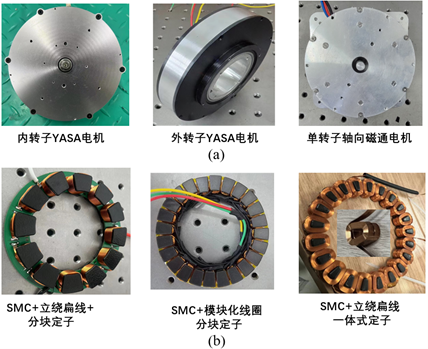
项目研制了3款电机,如图 62(a),包括内转子无轭分块电枢(YASA)电机、外转子YASA电机和单转子轴向磁通电机,对应定子中的材料和绕线工艺如图 62(b)所示。关键技术包括分块定子一体化制作工艺,轴向磁通电机电磁和结构设计,装配和误差调配方法;研制的YASA和单转子电机额定转矩密度超过4N.m/kg(有效重量),齿槽转矩小于3%;研制的单转子电机效率可达91%。
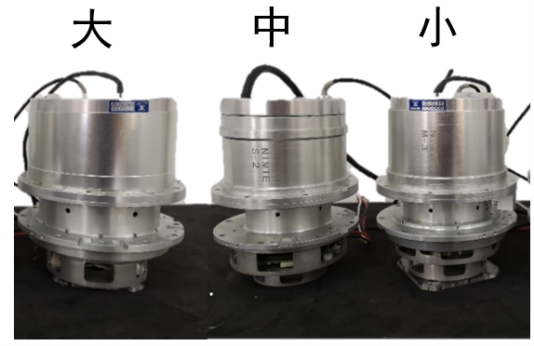
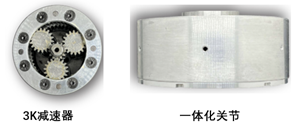
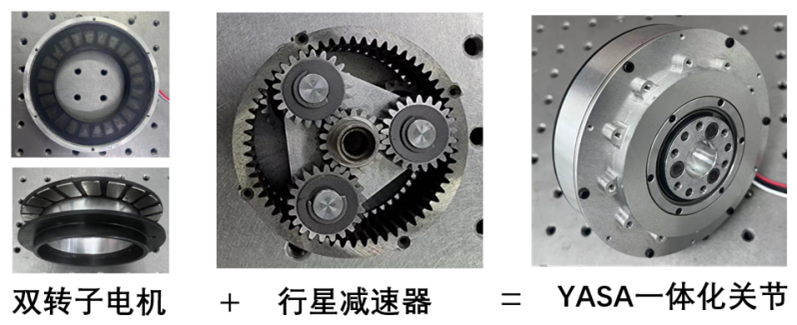
为了满足不同的输出力矩需求,我们设计了大、中、小三款一体化关节。如图 63所示,传动比分别为160、160、100,直径分别为140mm、100mm和95mm,关节重量分别为3.5kg、2.15 kg、1.35 kg,输入力矩常数分别为0.113 Nm/A、0.089Nm/A、0.067Nm/A。另外,我们试制了一款径向磁通电机+3K减速器的一体化关节,如图 64所示,其转矩密度为24 N.m/kg,传动比为45,反向力矩为3.6 N.m。我们也试制了一款轴向磁通电机+行星减速器的准直驱一体化关节,如图 65所示,其转矩密度为6.7 N.m/kg,传动比为18.78,反向力矩为1.89 N.m,为关节柔顺控制实验奠定了基础。
5.2 基于离散形式控制障碍函数的人机交互安全控制架构
在人机交互过程中,操作人员作为机器人的障碍物,其运动是具有高度非线性与未知性的,仅仅基于采集信息设计安全控制器存在风险。如何将未来时刻的人体轨迹信息引入安全控制器的设计中是需要解决的问题。同时,由于轨迹预测可能产生误差,为了保证人机交互的安全,通常需要使用较大的预设安全范围,这会降低机器人的工作效率。如何有效的评估预测轨迹的误差,并将评估结果引入安全控制器的设计中是需要解决的问题。
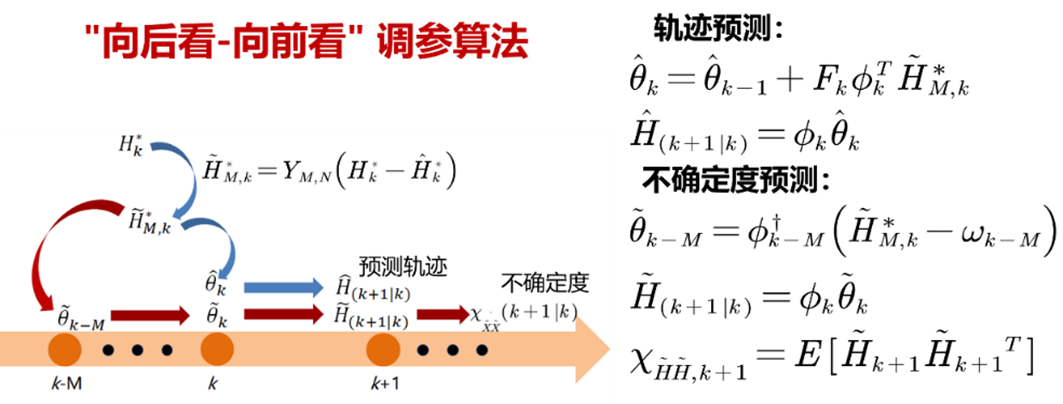
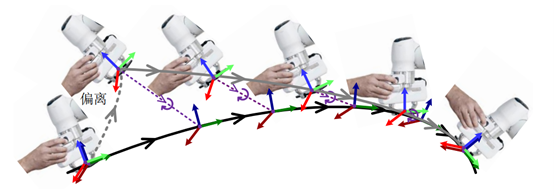
针对人-机器人共享一个工作空间时的安全作业问题,提出了一种通过半自适应在线调整神经网络模型输出层参数来预测人运动轨迹并评估预测轨迹不确定程度的“向后看-向前看”方法。
该方法首先离线训练一个n层的神经网络,随后通过固定前n-1层的权重,提取人体运动特征,将高度随机、非线性的人体运动模型转化为参数线性化的模型,神经网络模型结构如图 66所示。
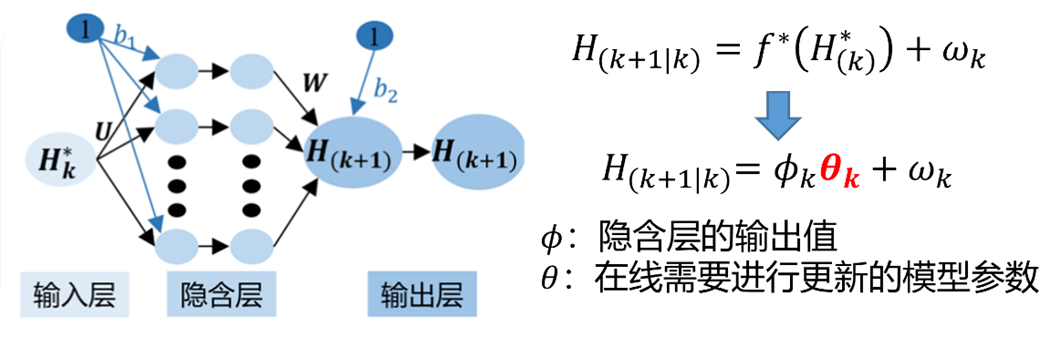
接着利用基于带遗忘因子的递推最小二乘法,通过采集到的新轨迹值调整神经网络输出层参数,从而实现轨迹预测。
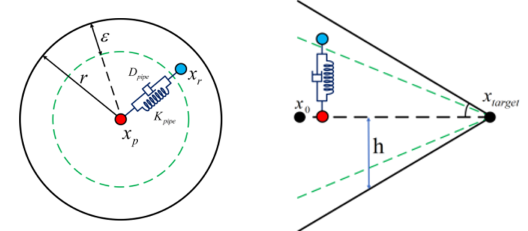
同时,利用过去时刻轨迹估计值与实际轨迹的差值,递推得到预测轨迹与实际轨迹的均方根误差,并将其作为预测轨迹的不确定程度。这有助于在未来的控制器设计中更加精准地评估预测轨迹的准确度,从而定义动态安全集,保证机器人工作的效率。预测过程示意图如图 67所示。
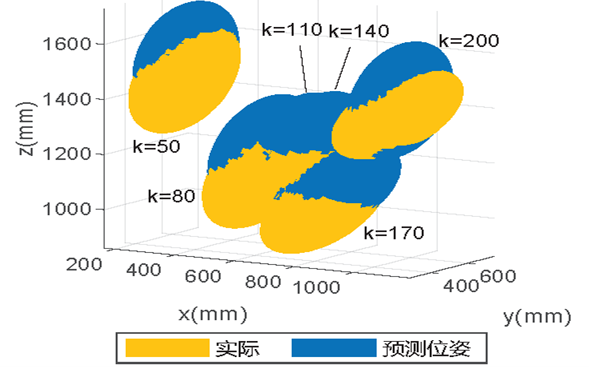
轨迹预测效果如图 68所示。
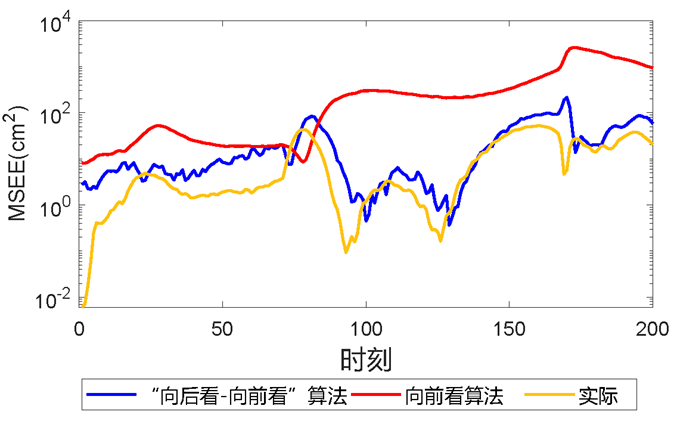
不确定度估计结果如图 69所示。
5.3 基于离散控制屏障函数的人机安全共存控制策略
在人机交互应用中,常用的规划层的避障算法虽然能够基于现有信息规划出机器人的无碰撞工作轨迹,但是其无法适应人机交互这种障碍物实时变化的场景。如何根据实时采集的外界障碍物信息设计安全运动控制算法指导机器人运动是亟待解决的问题,同时,由于轨迹预测可能产生误差,为了保证人机交互的安全,通常需要使用较大的预设安全范围,这会降低机器人的工作效率。如何有效的评估预测轨迹的误差,并将评估结果引入安全控制器的设计中是需要解决的问题。
针对上述问题本文提出了一种基于离散形式控制障碍函数的人机交互安全控制架构。该方法首先将人和机器人都视为空间中刚性线段的组合,通过空间中线段的位置关系具体定义了人与机器人各部分的距离。基于这些距离,通过离散形式的控制障碍函数构建了一组安全约束,并在初始控制输入的基础上,通过内点法优化出一个既满足约束条件,又最接近初始控制输入的控制率。同时,考虑到人机交互时人体运动的不确定性,该方法在构建约束时引入了由上述轨迹预测方法得到的轨迹预测信息,增加了人机交互的安全性。考虑到轨迹预测的不确定性以及较大安全范围造成的工作效率降低问题,该方法通过在约束中引入预测轨迹的不确定程度来补偿预测轨迹所可能产生的误差,进一步提高了人机交互的安全性也增加了人机交互的效率。通过增加由控制李雅普诺夫函数构建的稳定约束,该方法还可以使得机器人在避开障碍物的同时,维持自身任务的执行。
5.3.1人机交互模型
考虑人机交互中的操作人员,需要为他们建立模型来使得机器人能够理解人类的运动。一种简单的方法就是将整个人体视作为二维空间中的质点,或者三维空间中的球体、圆柱体等。然而,这种方法过于的保守,其需要膨胀很多区域使得人体的各部分均能够被包络在其中。并且,这样的简化模型无法体现出人体在空间中的运动形式,不利于人机交互中机器人对人类行为与意图的识别,会降低机器人的工作效率。本文将通过人体骨架模型的方式建立人体运动模型,这可以更加准确的表现出人体在空间中的运行。
通过定义出空间中的人体物理模型,可以将机器人简化为空间中刚性线段的组合。在人机交互情况下,我们定义i和j分别为机器人各个连杆、人体各部分的编号,其中
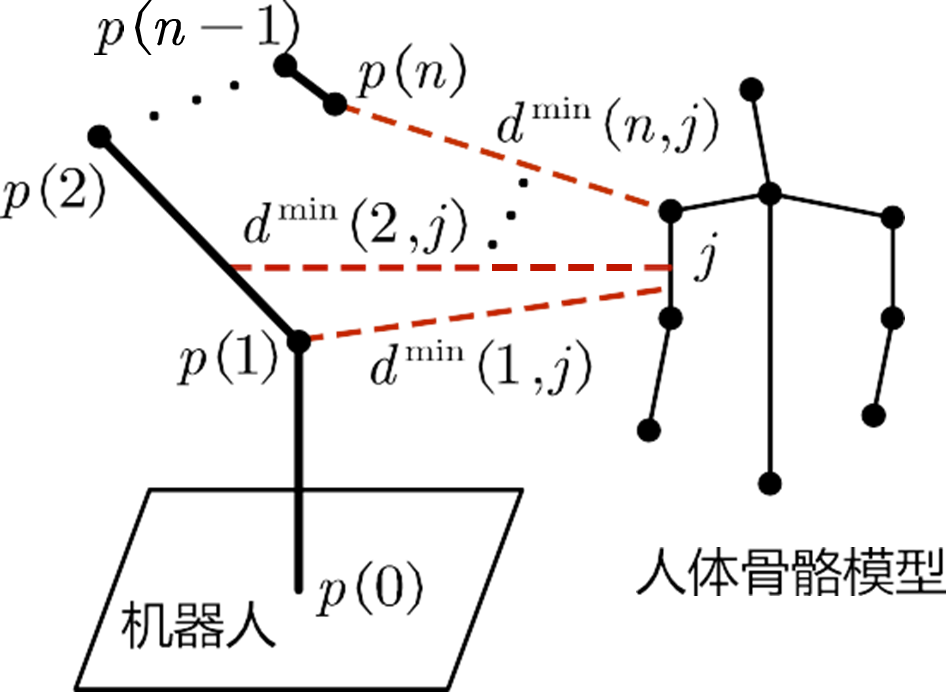
通过空间异面直线距离判断法,如果最近点是在刚性线段上的,如图 71所示,
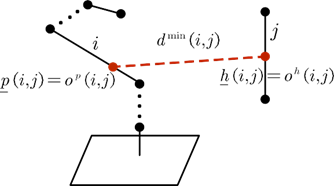
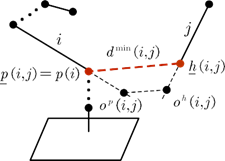
通过定义人机间的最近点
5.3.2最近点不确定度计算
基于前文的神经网络轨迹预测,同时对人体骨骼的各个关键点进行在线的轨迹预测,由于预测一定会存在误差,使用这样的安全约束构建方法需要增加预设安全距离的值,即使用较大的Dmin,才能够保证在人机交互的过程中的安全性能。本文将预测轨迹的均方根误差(RMSE)作为对预测轨迹不确定度估计值融入到离散形式控制障碍函数的构建中(图 73),来对预测信息可能存在的误差进行一些补偿。
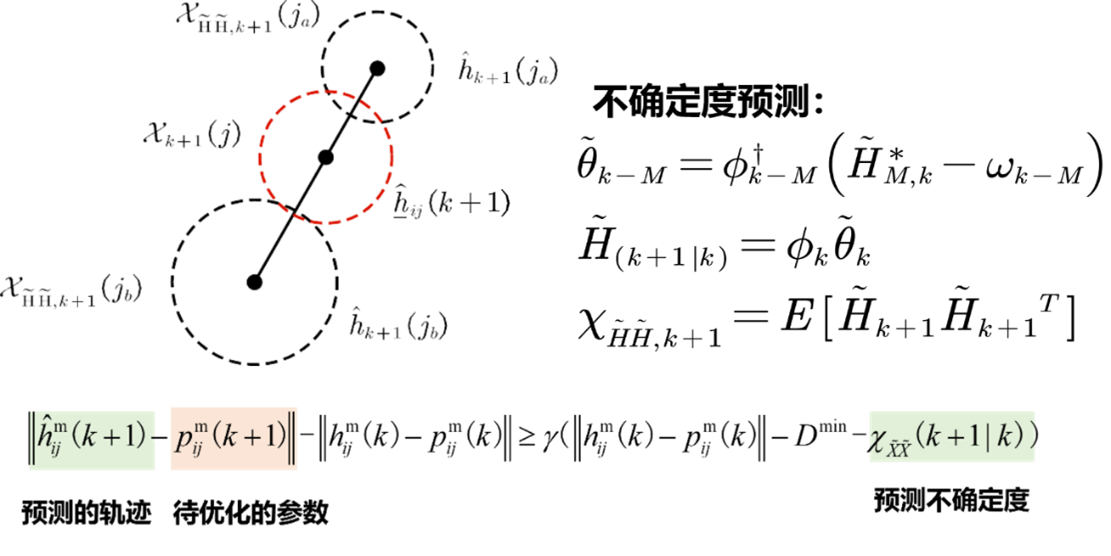
利用过去时刻轨迹估计值与过去时刻实际轨迹的误差,对未来轨迹预测的不确定程度进行评估并将预测结果的不确定度引入约束的构建中,补偿轨迹预测的估计误差,提高了控制的安全性与效率。
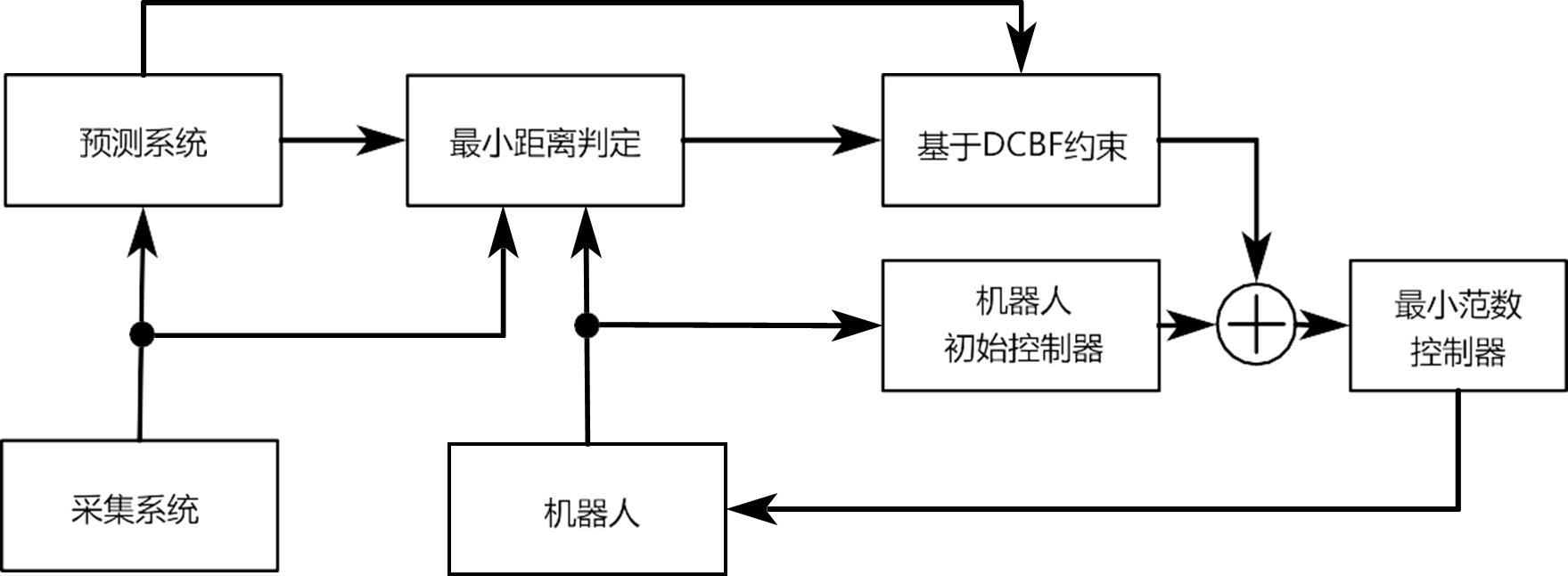
通过上述步骤,我们基于离散形式的控制障碍函数,结合轨迹预测信息与预测轨迹不确定信息构造了针对人机协作的安全控制约束,整体安全控制算法的流程如图 74所示。
仿真测试是使得KUKA iiwa 14机器人从初始位姿行进到设定的目标点,同时避开CMU数据库中人体运动的轨迹,我们设定安全距离
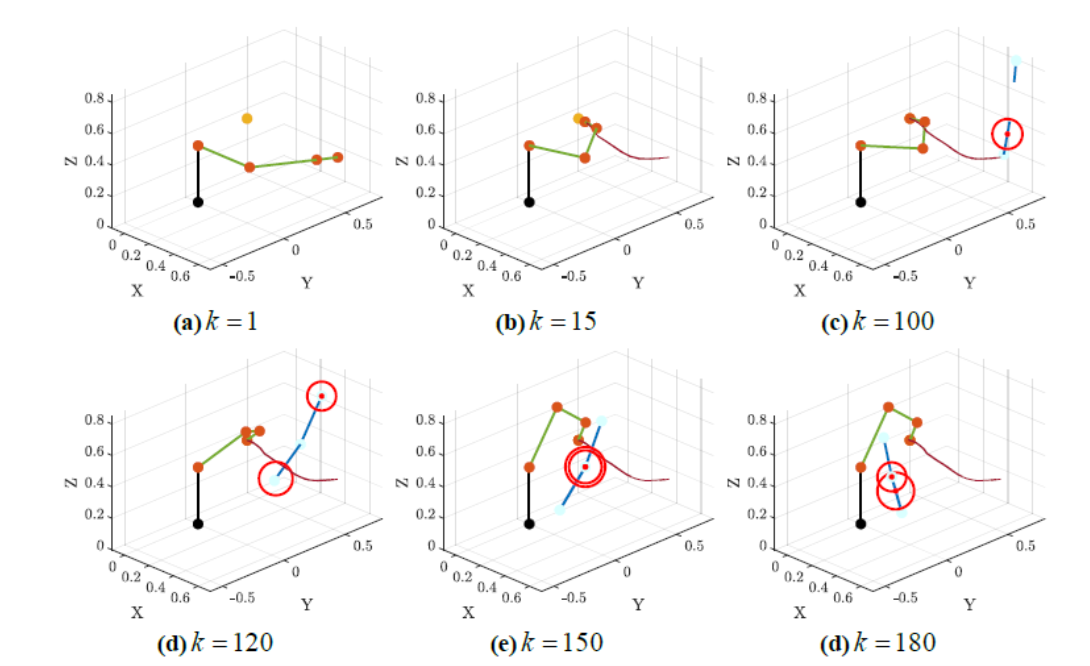
与前文不同的是,图中代表人体与机器人预设的安全距离范围的红色圆圈是动态的,这是因为我们在约束中增加了对预测轨迹误差的补偿。与第三章类似, 对比这两组图,控制算法在基于离散控制障碍函数约束的作用下,能够使得机器人在运动的过程中呈现远离与之交互的操作人员周围,同时基于离散控制李雅普诺夫函数约束的加入同样也能够让机器人的末端执行器保持在目标点处。
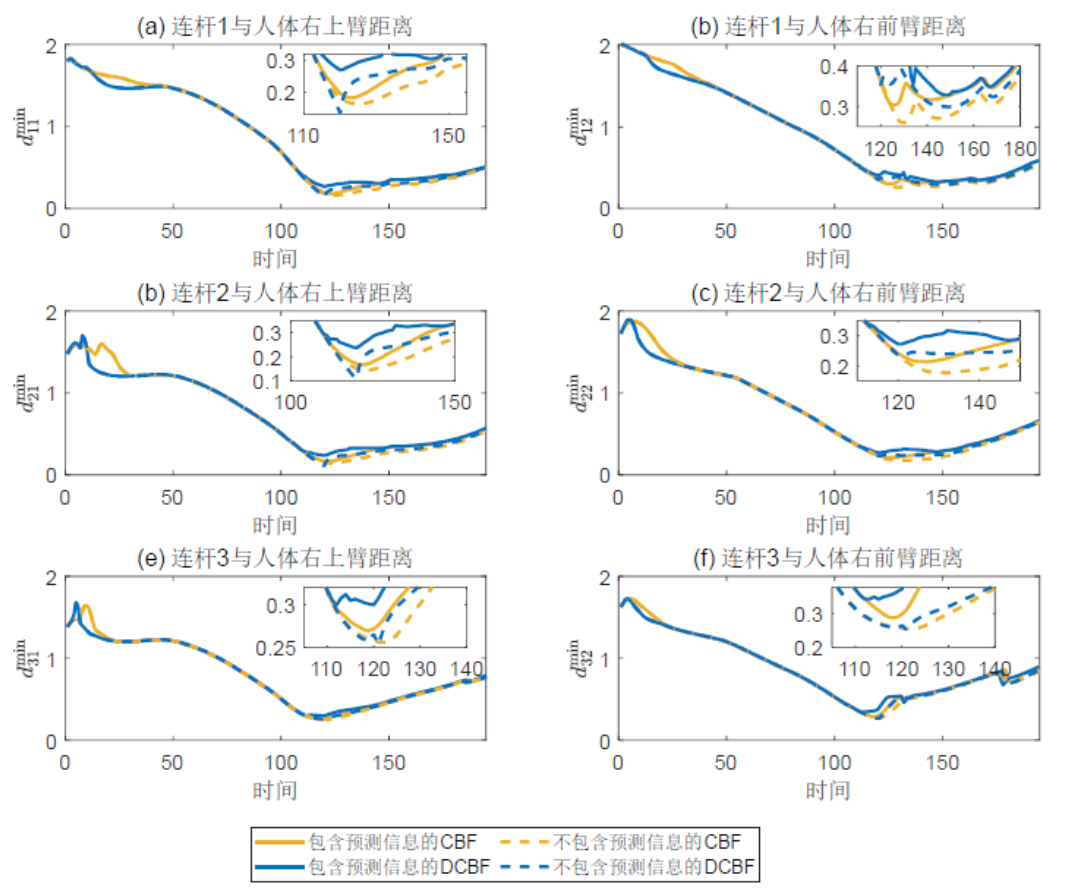
图 76展示了基于离散形式控制障碍函数构建约束与基于连续形式控制障碍函数构建约束以及是否包含轨迹预测信息的四种约束构建方法对于同一个仿真场景的实验效果。图中蓝色和黄色的实线分别代表使用了预测信息的两种约束,虚线反之,代表了未使用预测信息的距离结果。可以看出,对于预设的安全距离
5.4 人体胸腔碰撞模型及人机协作碰撞安全性研究
由于协作机器人与人工作在同一个工作空间内,人机碰撞的发生几乎是不可
避免的。所以ISO15066中提出的功率和力限制方法是一种避免发生碰撞后机器人对人造成过度伤害的有效方法,但是尽管这确保了操作人员的安全,却由于我们对于人机碰撞过程中人体受伤害程度并不清楚,而对机器人施加了过于保守的速度限制导致机器人运行效率太低。
为了评估人体受到的伤害,建立一个准确的可以评估人机碰撞过程人体受伤害程度的模型是非常必要的。目前关于人体碰撞过程中受伤害程度的研究主要集中在汽车碰撞的相关研究中。根据前人相关研究中对尸体胸部碰撞试验数据和文献中建立的胸腔模型的进一步分析,发现在碰撞速度较大的试验场景下,该模型所得到的碰撞响应的初始形变量和斜率较小,与尸体实验碰撞响应存在较大偏差,同时该模型还存在未考虑人体身高体重、模型中参数固定不变等缺点,导致出现对人体胸腔所承受的力预测不准确的问题。
通过在原模型的
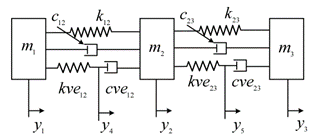
将胸腔各部位质量
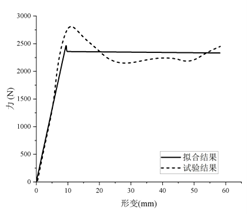
以原实验曲线作为拟合对象,利用最小二乘法建立模拟模型的碰撞响应与原实验曲线的适应度函数,随后利用粒子群优化算法经过多次迭代优化,得到等效碰撞模型中的参数数值。
将优化后的胸腔模型进行碰撞仿真,结果如图 78 所示,可以发现新得到的模型响应可以很好地拟合试验图像,并且第一段曲线几乎与实验图像重合。由于计算机器人安全限制速度主要用到的是第一段曲线,所以第一段曲线较高的拟合精度可以保证安全限制速度计算的精准,达到了优化的目的。
为了对比优化前后的碰撞模型的精度,进行了对比仿真分析,结果如图 79所示。
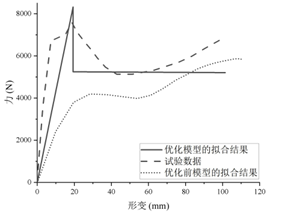
可以发现优化模型的输出在全域都较优化前的模型更加贴合尸体碰撞试验数据。对二者实验结果进行归一化,优化模型在大部分区间较优化前模型提升在 40%~100% 之间,并且在计算安全限制速度所需要的区间内始终要优于优化前的模型。
5.5 基于高维虚拟夹具技术的人机协作方法研究
研究虚拟夹具技术在机器人辅助柔顺控制的应用,提出了一种引导型和禁止区域型虚拟夹具(图 80),该高维虚拟夹具定义方式将姿态约束与位置约束统一起来,解决了虚拟夹具定义的局限性。
针对虚拟夹具技术在曲线跟踪任务中的应用需求,提出了一种基于变阻抗的曲线跟踪高维虚拟夹具控制方法(图 81),解决了针对曲线跟踪任务中由于位置和姿态量纲不统一所带来的最短距离求解困难问题。
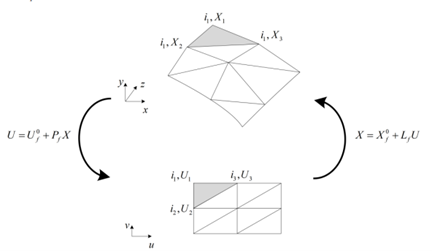
针对虚拟夹具技术在曲面作业任务中的应用需求,提出了一种基于离散化曲面参数映射的高维虚拟夹具(图 82),解决了针对曲面作业任务的中由于位置和姿态量纲不统一所带来的最短距离求解困难及代理点姿态动态变化问题。
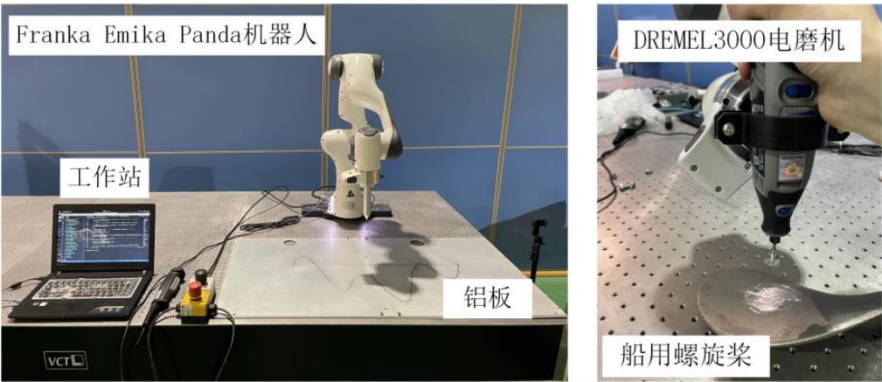
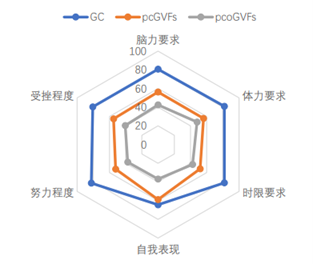
搭建了人机协作曲线跟踪及螺旋桨打磨实验平台(图 83),并基于此开展了高维虚拟夹具实验,通过NASA-TLX评估表可以对操作者完成任务所承受的精神负担进行评估(图 84)。实验结果表明提出的基于变阻抗的管锥高维虚拟夹具及管状高维虚拟夹具与重力补偿方法相比,任务执行效率最少提高了36.93%和40.11%,操作人员精神压力分别降低了29.96%和47.42%,有效地验证了所提出的曲线跟踪高维虚拟夹具设计方法的优越性,并且体现出管锥高维虚拟夹具在曲线终点具有更好的引导效果;提出的基于离散化曲面参数映射的高维虚拟夹具可以将误差控制在较小的范围内,并且随着阻抗控制刚度的增大,跟踪误差进一步减小。本方法可以在人机协作时通过精准的力交互为操作人员提供运动的引导和限制,大幅提高人机协作的效率和精度,同时降低操作者的精神负担,具有重要的应用价值。