4.2 基于运动意图估计和力前馈补偿的人机协作神经导纳控制
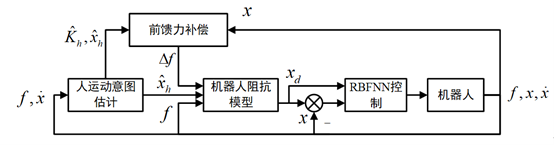
研究了运动意图估计与力前馈补偿在人机协作任务的应用,提出了一种基于运动意图估计与力前馈补偿的神经网络阻抗控制方法(图 60),基于人体肢体动力学模型,通过最大似然估计估计人体刚度和意图位置,不需要人为给定先验知识,利用数据收敛到真实值,在估计人体意图和刚度的基础上,提出力前馈补偿来最小化交互力和位置跟踪波动,在导纳控制的基础上结合人体意图、力前馈补偿和RBFNN位置控制内环提出了一个完整的人机协作框架,解决了在人机协作中机器人无法感知人类意图而造成的被动协作和能量消耗大的问题。
在人机协作搬运实验中,验证了所提成人类意图估计和力前馈补偿的神经导纳控制框架相比较传统导纳控制,平均减小人类伙伴能量消耗50%,提高了0.3s的位置响应速度,增强了人机协作中的交互柔顺性。本方法使人类操作者和机器人具有直接的力和运动的交互,则可以充分发挥人类操作者在环境感知、理解、判断和决策方面的优势,结合机器人精准、不知疲倦的优点,形成优势互补,尤其是在医疗、遥操作、社会服务等领域具有突出的技术优势和良好的应用前景。